随着科技水平的持续提升,企业生产机器人的规模呈现扩大趋势�。机器人作为自动执行任务的机器装置�,不仅能够接受人类指令,还可通过预先设定的程序或人工智能技术制定的规则完成操作�。在机器人正式投产前,需通过打印手板模型进行功能验证���。那么��,3D打印机器人手板模型通常采用哪些材料����?
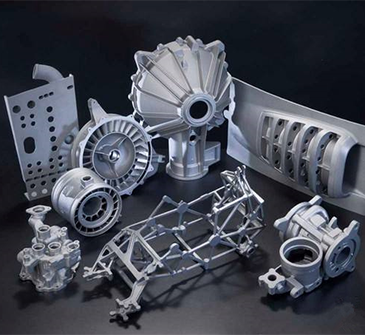
机器人的属性差异决定了材料选择的多样性。例如��,以塑料结构为主的机器人�,其外壳手板模型多采用光敏树脂制作;而金属材质的机器人则常用铝合金或不锈钢作为外壳材料���。部分金属构件同样会通过3D打印工艺实现�,形成塑料与金属材料复合的机器人外壳手板模型���。
具体到机器人本体结构���,光敏树脂是制作手板模型的常用材料?��;魅吮鄄慷嗖捎每占淇戳嘶股杓?���,该部分常选用铝合金手板以实现轻量化与强度平衡?����;魅嗽硕保垂亟冢┑呐渲弥苯泳龆ㄆ渥杂啥仁?,关节型式与运动坐标形式的差异��,使得机器人本体被划分为基座���、腰部�����、臂部����、腕部�、手部夹持器(或末端执行器)及行走部(针对移动机器人)等功能模块�。
值得注意的是,机器人内部金属构件较少���,通常仅涉及线路板固定支架等辅助结构��。通过制作手板模型�,可有效验证机器人的多项功能,例如执行机构的运动模式(包括直角坐标式�、圆柱坐标式、极坐标式和关节坐标式等类型)���。无论是单件手板模型验证还是小批量试产����,当前均以CNC加工工艺为主导制作方式�����。
标签:
上一篇:哪些领域中可以用到现代化的金属3D打印技术
下一篇:实验室培育木材让3D打印生物材料更加多样化
 销售热线:158-1687-3821
销售热线:158-1687-3821